ARM CM4 Pratice (3): USART 初探
致謝
感謝網友Zack,Villar,學弟Joe Ho,還有其他大大的幫忙,不然這次應該是撞牆撞到死吧。
前言
這次實驗有卡關,不然其實不算難。卡關的點如下:
一開始使用USART1,可是USART1接到STLink 接腳,最後用USART6代替。(STM32F4 Discovry Disco 開發版手冊,p19, SB11那段)
SPL的HSE 設定和版子不合,造成Baud rate計算錯誤。
這次的實驗是一個ECHO程式,透過版子上的USART6和電腦連線,電腦送出什麼字元,版子就傳回什麼字元。
目錄
- 事前準備
- 測試環境
- USART 控制
- 程式碼
- 完整程式碼
- Makefile
- 功能驗證
- 參考資料
事前準備
- Saleae 邏輯分析儀 (一千新臺幣有找)
- 需要自行到Saleae官方網站下載安裝Linux版軟體
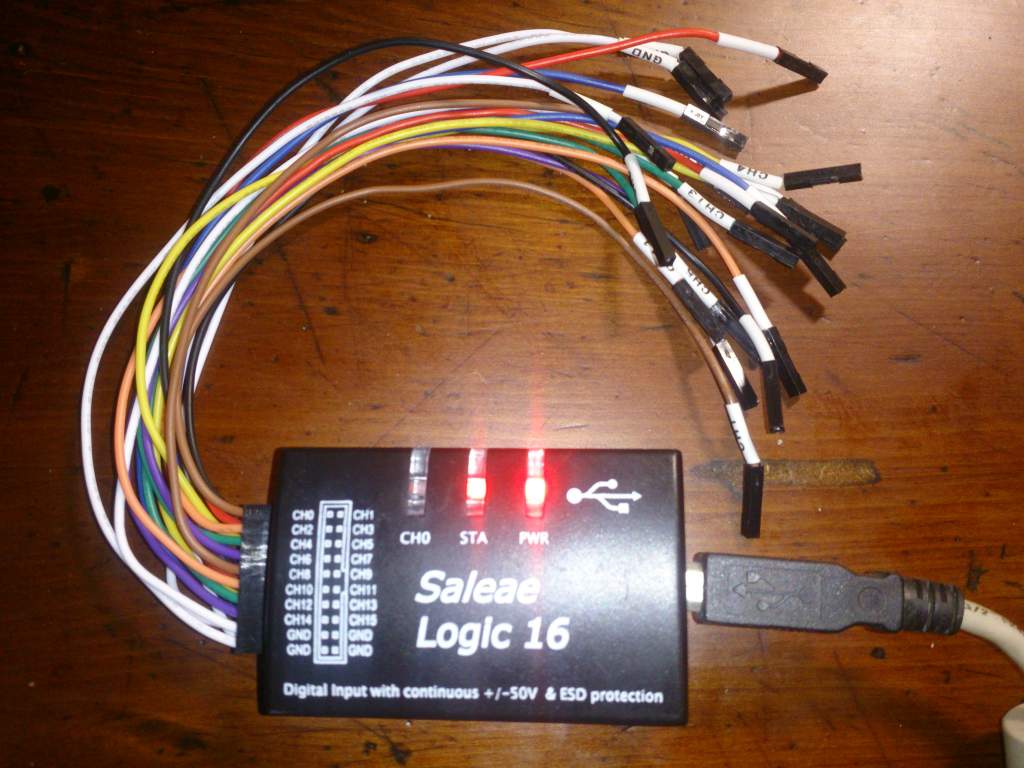
- USB 轉 RS232 TTL 轉接線

測試環境
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 14.04.4 LTS
Release: 14.04
Codename: trusty
$ arm-none-eabi-gcc --version
arm-none-eabi-gcc (GNU Tools for ARM Embedded Processors) 5.4.1 20160609 (release) [ARM/embedded-5-branch revision 237715]
...
- SPL版本: STM32F4xx_DSP_StdPeriph_Lib_V1.6.1
- 開發板: STM32F4 Dicovery, STM32F429-Disco
USART 控制
對於組裝工來說,我想要理解的不是電位差之這些電器信號。甚至在組裝時我也不在意暫存器設定等東西和背後的原理(好孩子不要學)。我關心的是
- 我們要用哪些資源?
- 這些資源對應的實體腳位是?
- 軟體中怎麼樣設定和啟動設備?
- 軟體中怎麼樣傳輸資料?
我們針對這四個問題一一處理
我們要用哪些資源?
從手冊可以看到有八個USART可以用。我原本是挑USART1來用,不過後來卡關經過網友提醒發現要避開USART1。後來發現APB2上面除了USART1外另外一個USART是USART6。懶得太多程式碼的情況下就挑了USART6。
這些資源對應的實體腳位是?
一樣要翻手冊。
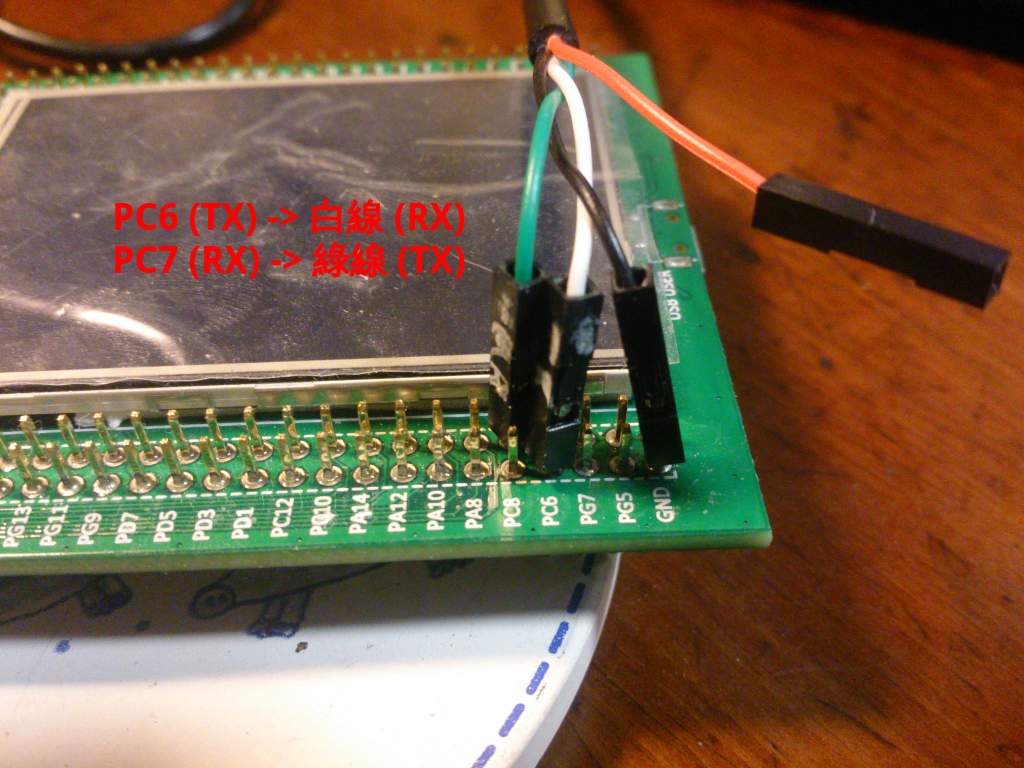
- PC6: UASRT6 TX
- PC7: USART6 RX
軟體中怎麼樣設定和啟動設備?
要分兩個部份討論
a. GPIOC 設定
要設定
- 開啟GPIOC的clock
設定Pin腳,設定PC6和PC7這兩個腳位。為什麼是這兩個腳位請查手冊
- PC6: 設成Alternate function,也就是USART6 TX
- PC7: 設成Alternate function,也就是USART6 RX
- 其他
- 設定為Pull UP,這和USART通訊協定有關,在IDLE時維持高電位
- 設定Push-Pull輸出模式,這個我完全不懂只是閉著眼睛抄的
來看大家最討厭看的程式碼片斷吧
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIOC clock */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
/* Connect USART6_Tx instead of PC6 */
GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_USART6);
/* Connect USART6_Rx instead of PC7 */
GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_USART6);
/* Configure USART Tx (PC6) and Rx (PC7) as alternate function */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
b. USART6 設定
依下列步驟
- 開啟USART6的clock
- 設定USART6
- 115200 BPS
- No parity bit
- 8-bit 資料
- 1 Stop bit
- 關閉硬體流量控制
- TX/RX模式都打開
- 啟動UASRT6
一樣來看大家最討厭看的程式碼片斷吧
USART_InitTypeDef USART_InitStruct;
/* Enable USART6 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6, ENABLE);
/* 115200, N81 */
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Apply USART settings */
USART_Init(USART6, &USART_InitStruct);
/* Enable USART */
USART_Cmd(USART6, ENABLE);
軟體中怎麼樣傳輸資料?
這部份還蠻直覺的,就是檢查狀態。可以送的時候就寫資料到暫存器去;有資料時從暫存器讀出資料。程式碼夠短應該不會那麼討厭吧?另外SPL也有提供USART傳輸接收的函數,請自行查詢。
char getchar(void)
{
while(USART_GetFlagStatus(USART6, USART_FLAG_RXNE) == RESET);
return USART6->DR & 0xff;
}
void putchar(char c)
{
/* Wait until data was tranferred */
while(USART_GetFlagStatus(USART6, USART_FLAG_TXE) == RESET);
USART6->DR = (c & 0xff);
}
程式碼
前面有提到HSE設定需要更動為8MHz。我是在stm32f4xx_conf.h加入以下片斷。
#if defined (HSE_VALUE)
/* Redefine the HSE value; it's equal to 8 MHz on the STM32F4-DISCOVERY Kit */
#undef HSE_VALUE
#define HSE_VALUE ((uint32_t)8000000)
#endif /* HSE_VALUE */
完整程式碼
就是把前面的設定合體再加上一些helper就是了。這個程式也不難,就是印出你打的字。當你按enter後會自動塞入\r並且印出提示符號。
- usart.c
#include "stm32f4xx_conf.h"
#include <stm32f4xx.h>
#include <stm32f4xx_gpio.h>
#include <stm32f4xx_usart.h>
void setupUSART(void);
/* helper functions */
void print(char *str);
char getchar(void);
void putchar(char c);
int main(int argc, char **argv)
{
/* Setup USART */
setupUSART();
/* Greeting */
print("Hello World\n");
print("\r> ");
while(1) {
/* Echo a character */
char c = getchar();
putchar(c);
/* Show prompt with enter */
if (c == '\n') {
print("\r> ");
}
}
return 0;
}
void setupUSART(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIOC clock */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
/* Connect USART6_Tx instead of PC6 */
GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_USART6);
/* Connect USART6_Rx instead of PC7 */
GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_USART6);
/* Configure USART Tx (PC6) and Rx (PC7) as alternate function */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
/********************************************
* USART set started here
********************************************/
USART_InitTypeDef USART_InitStruct;
/* Enable USART6 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6, ENABLE);
/* 115200, N81 */
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Apply USART settings */
USART_Init(USART6, &USART_InitStruct);
/* Enable USART */
USART_Cmd(USART6, ENABLE);
}
char getchar(void)
{
while(USART_GetFlagStatus(USART6, USART_FLAG_RXNE) == RESET);
return USART6->DR & 0xff;
}
void putchar(char c)
{
/* Wait until data was tranferred */
while(USART_GetFlagStatus(USART6, USART_FLAG_TXE) == RESET);
USART6->DR = (c & 0xff);
}
void print(char *str)
{
assert_param(str != 0);
while(*str) {
putchar(*str);
str++;
}
}
/* Trap here for gdb if asserted */
void assert_failed(uint8_t* file, uint32_t line)
{
while(1);
}
- Makefile
有兩點要說明
- 加入stm32f4xx_usart.c
- 加入make flash自動燒錄
- 目前發現使用st-flash燒錄有時候顯示燒錄完成,但是實際上測試還是燒錄前的行為,換成openocd測試中
#----------------------------------------------------------------------------------
# Commom settings
#----------------------------------------------------------------------------------
TARGET=usart
PRJ_ROOT=$(shell cd ../../ ; pwd)
include $(PRJ_ROOT)/conf/build.def
#----------------------------------------------------------------------------------
# Files to build
#----------------------------------------------------------------------------------
SRCS = $(CMSIS_STARTUP_SRC) $(CMSIS_SYSTEM_SRC)
SRCS += $(STM_DIR)/src/stm32f4xx_gpio.c
SRCS += $(STM_DIR)/src/stm32f4xx_rcc.c
SRCS += $(STM_DIR)/src/stm32f4xx_usart.c
SRCS += usart.c
C_OBJS = $(patsubst %.c, %.o, $(SRCS)) # translate *.c to *.o
OBJS = $(patsubst %.s, %.o, $(C_OBJS)) # also *.s to *.o files
OUT_OBJS = $(addprefix $(OUT_DIR)/, $(OBJS))
#----------------------------------------------------------------------------------
# Build here
#----------------------------------------------------------------------------------
$(OUT_DIR)/$(TARGET).bin: $(OUT_OBJS)
$(TOOL_CHAIN_PREFIX)-gcc -Wl,-Map=$(OUT_DIR)/$(TARGET).map,-T$(TARGET).ld -nostartfiles \
$(CFLAGS) $(OUT_OBJS) -o $(OUT_DIR)/$(TARGET).elf
$(TOOL_CHAIN_PREFIX)-objcopy -Obinary $(OUT_DIR)/$(TARGET).elf $@
$(TOOL_CHAIN_PREFIX)-objdump -S $(OUT_DIR)/$(TARGET).elf > $(OUT_DIR)/$(TARGET).list
$(OUT_DIR)/%.o: %.s
mkdir -p $(dir $@)
$(TOOL_CHAIN_PREFIX)-gcc -c $(CFLAGS) $< -o $@
$(OUT_DIR)/%.o: %.c
mkdir -p $(dir $@)
$(TOOL_CHAIN_PREFIX)-gcc -c $(CFLAGS) $< -o $@
flash: $(OUT_DIR)/$(TARGET).bin
openocd -f interface/stlink-v2.cfg \
-f target/stm32f4x.cfg \
-c "init" \
-c "reset init" \
-c "stm32f2x unlock 0" \
-c "flash probe 0" \
-c "flash info 0" \
-c "flash write_image erase $< 0x8000000" \
-c "reset run" -c shutdown
clean:
rm -fr $(OUT_DIR) gdb.txt
功能驗證
邏輯分析儀驗證
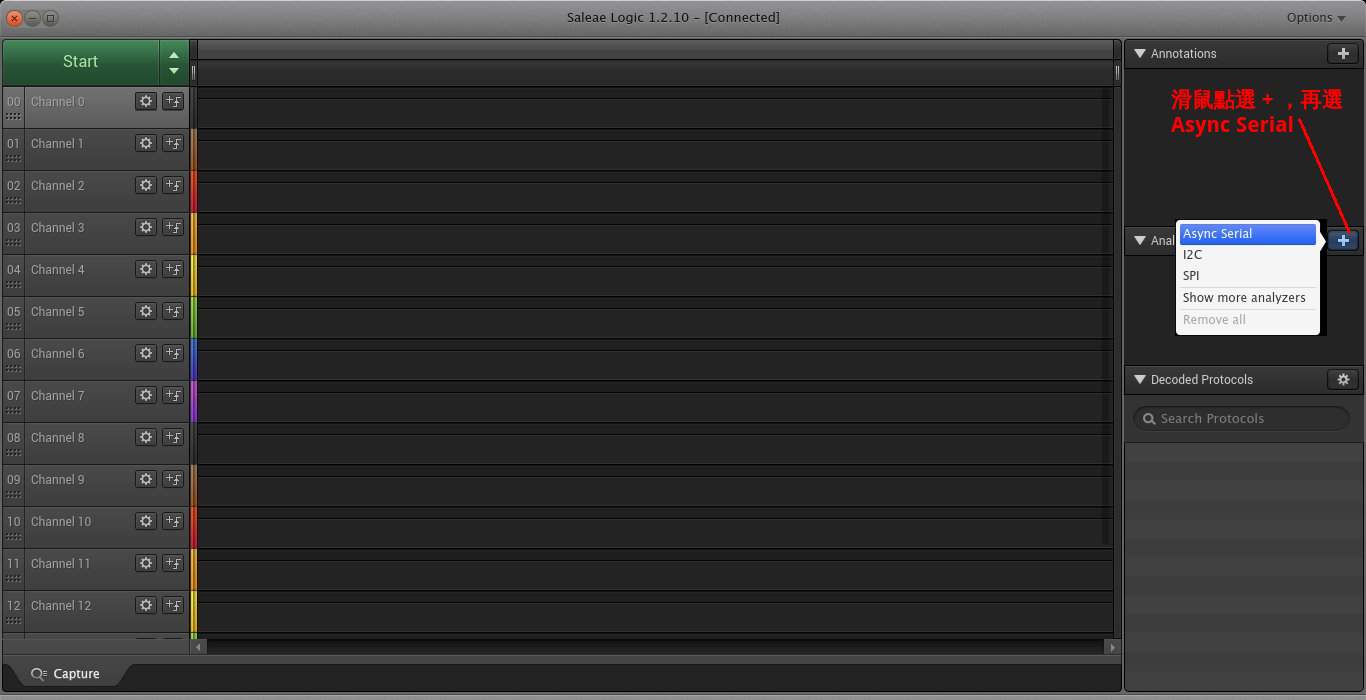
現在邏輯分析儀已經可以自動幫你抓波形分析了。當你下載並解壓縮檔案後,記得更新udev的Rule讓電腦可以認得邏輯分析儀。
接下來你要設定邏輯分析儀的分析通訊協定為Async Serial 如下圖
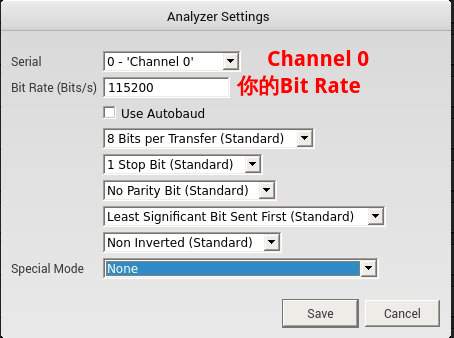
選了Async Serial會有選單出現,你需要設定用第幾個Channel以及USART通訊參數如
如果需要的話,你可以進一步設定取樣速度、取樣時間如下圖

假設你的邏輯分析儀接腳都接好了就可以按開始分析訊號了
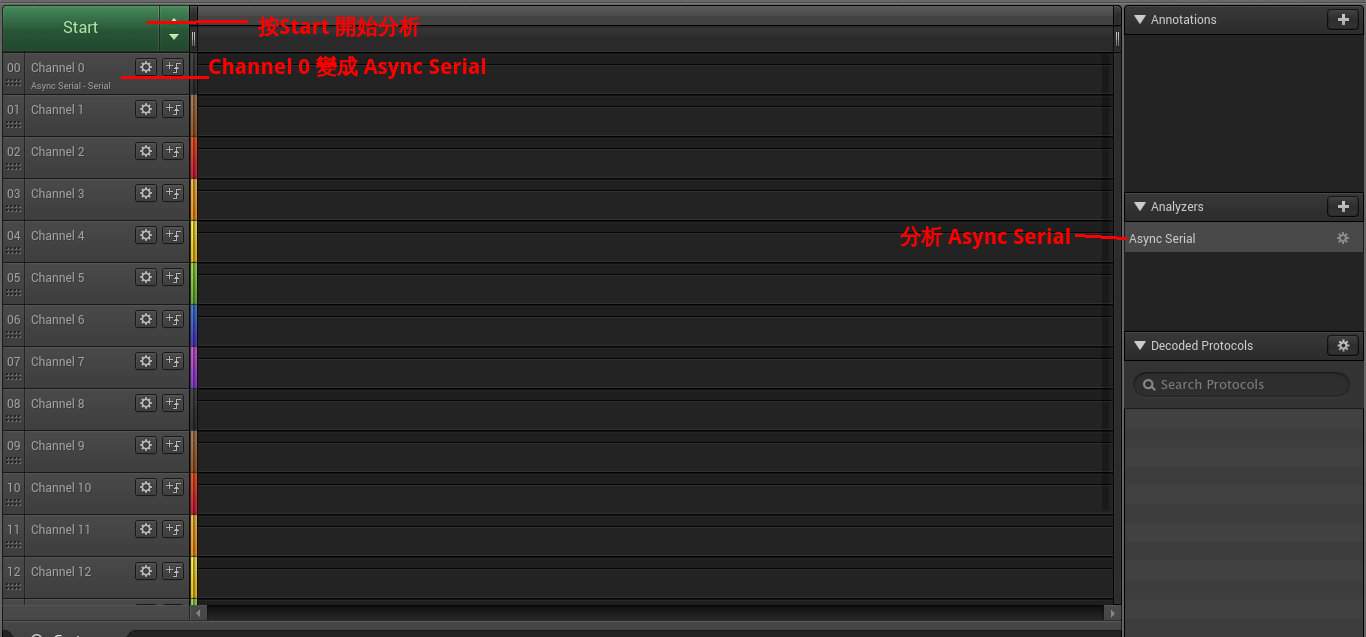
這是一個成功的Hello World波形分析,圖可能有點小,全圖在這邊。

實際驗證
你需要先把USB 轉 RS232 TTL 轉接線接到版子上如下圖
我是使用mintern,執行畫面如下
$ miniterm.py -b 115200 -p /dev/ttyUSB0
--- Miniterm on /dev/ttyUSB0: 115200,8,N,1 ---
--- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H ---
test
> test
> test
> test
> testast
> teadsatdsasd
參考資料
Geoffrey Brown: Teaching
- 請找 Lab Manual 裡面的link, 書名是Discovering the STM32 Microcontroller
STM32F4 Discovry Disco 開發版手冊
- STM32F4 DSP and standard peripherals library