Day 6:I2C (Part 1) - 簡介與環境設置
關於 Linux 的 I2C 子系統,在 2020 年的 ELCE 上有一個 Tutorial: Introduction to I2C and SPI: Both In-kernel and In-userspace 的演講,裡面大致介紹了 I2C 的協定,以及核心當中 I2C 子系統的架構。而這個演講中的 I2C 部分,跟 2018 年 Southern California Linux Expo 中,一個名為 Linux, I2C, and me 的演講中幾乎一樣 (至少投影片根本一樣)。雖然音質頗差,但內容比前者更詳細。
為了展示 Linux 在使用 I2C 時發生了什麼事,接下來的實驗將使用一個 Raspberry Pi 作為 master,以及一個 Arduino UNO 作為 slave,並且從 Raspberry Pi 以 I2C 傳輸資料給 Arduino UNO 時,觀察使用了哪些函數,並且搭配核心的文件進行參考。
I2C Protocol
I2C 是 Inter-Intergrated Circuit 的縮寫,最早是 Philips 在 1982 年開發的,而現在他則是 NXP 的一部分。所以正式的規格可以在 NXP 的 I2C-bus specification and user manual 文件上找到。
物理層簡介
I2C 需要兩條線路傳輸,一個是 SDA (傳輸資料),另外一個是 SCL (提供時脈)。支援 nulti-master multi-slave (不過大部分的狀況下都是只有一個 master),並且最多可以連接 127 個裝置。在一開始的規格中,每個裝置都會有一個 7 位元的「位址」。
除了 I2C 之外,根據 Tutorial: Introduction to I2C and SPI: Both In-kernel and In-userspace 中提到:另外一個類似的協定叫做 SMBus,是一個 I2C 協定的子集,所以也常常在 I2C 的子系統中出現。
傳輸協定

(來源:維基百科)
I2C 當中,開始傳輸前,SDA 與 SCL 一開始都處於高電位。要開始傳輸時:
- 進入 start condition (S):master 把 SDA 拉低。如果 SDA 拉低時,SCL 仍然持平在高電位,這個狀態稱作 start condition (
S)。隨後 SCL 跟著拉低,並且準備開始傳輸。 - SDA 傳輸資料。資料的傳輸則是跟著 SCL 的時脈走:當 SCL 為高電位時,傳輸 SDA 當時的高低狀態。而這傳輸的資料中,又大致上分成兩個階段:
- 傳送 7 位元位址:master 在 start condition 之後,會傳一個 7 位元的資訊。這 7 個位元表示要讀或寫哪個 slave (也就是 slave 的位址)。
- 傳送第 8 位元表示讀或寫:7 個位元的位址之後,接著傳輸地 8 個位元。這個位元決定的是 master 要「讀」或是「寫」。
- Slave ACK 一次確認:傳送玩 8 個位元之後,收到的 Slave 就要
舉手喊有ACK 一次。ACK 的方法是 Slave 要把 SDA 拉低。 - 傳輸資料:之後就開始依照時脈傳輸資料。如果是 master 要寫,那就是 slave 依照時脈讀讀取 SDA; 如果是 master 要讀,那就是 slave 透過 SDA 搭配時脈讀取 SDA 的高低電壓。除此之外,每 8 個位元會傳輸一個 ACK。如果是 master 寫,那麼就是接收資料的 slave 要 ACK 說有收到; 如果是 master 從 slave 讀東西,那就是 master 要 ACT 說有收到。
- 資料結束:如果是 master 寫,那麼其實 slave 沒有辦法選擇自己要不要停,只能逆來順受被 master 餵資料,直到最後傳完 ACK 才能停; 而如果是 master 讀,當 master 不需要資料時,傳一個 NA 給 slave 知會一聲就可以了。
- 進入 stop condition:SCL 先拉高,隨後 SDL 跟著拉高。
所以,如果用 [] 表示從 Slave 傳輸的資料,那麼 master 寫時,大概像這樣:
S Addr W [A] Data0 [A] Data1 [A] ... [A] dataN [A] P
相反地,若是 master 讀的時候,狀態順序大概像下面這樣:
S Addr R [A] [Data0] A [Data1] A ... A [dataN] NA P
Step 1:Arduino 上的 I2C (硬體)
前面知道:I2C 需要 SDA 與 SCL 兩條線來傳輸資訊,而根據 Arduino 官方的文件 可以查到如下資料:
Board I2C / TWI pins
Uno, Ethernet A4 (SDA), A5 (SCL)
Mega2560 20 (SDA), 21 (SCL)
Leonardo 2 (SDA), 3 (SCL)
Due 20 (SDA), 21 (SCL), SDA1, SCL1
因此,就 Arduino UNO 而言,若想要使用 I2C,需要使用 A4 為 SDA,A5 為 SCL。
Step 2:Arduino 上的 I2C (軟體)
程式方面,Arduino IDE 內建的 Wire.h 函式庫中,可以使用 I2C。用法可以參考官方網站的 Master Writer/Slave Receiver 例子略知一二。以下程式修改自其中:
#include <Wire.h>
#define ARDUINO_ADDR 0x8
char buf[128];
void setup()
{
Wire.begin(ARDUINO_ADDR);
Wire.onReceive(receiveEvent);
Serial.begin(9600);
}
void loop()
{
delay(100);
}
void receiveEvent(int nbyte)
{
buf[nbyte] = 0;
for (int i = 0; Wire.available(); i++)
buf[i] = Wire.read();
Serial.println(buf);
}
Step 3:Raspberry Pi 上的 I2C (硬體)
從 pinout.xyz 可以知道 Raspberry Pi 中,GPIO2 可以作為 SDA; GPIO3 可以作為 SCL。所以,把 GPIO2 跟 Arduino 的 A4 連接; 把 GPIO3 跟 Arduino 的 A5 連接。最後,再把地線接在一起,就完成硬體的設置了。
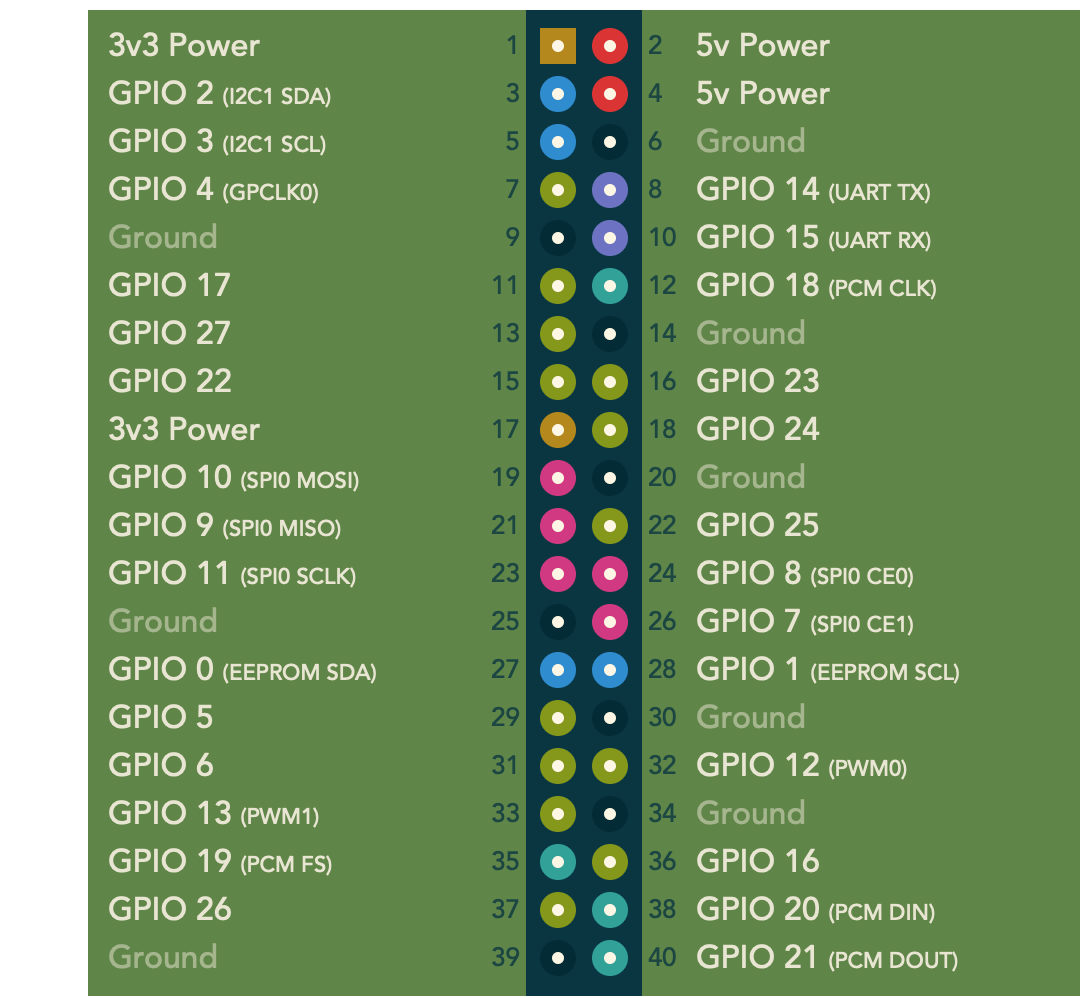
(來源:pinout.xyz)
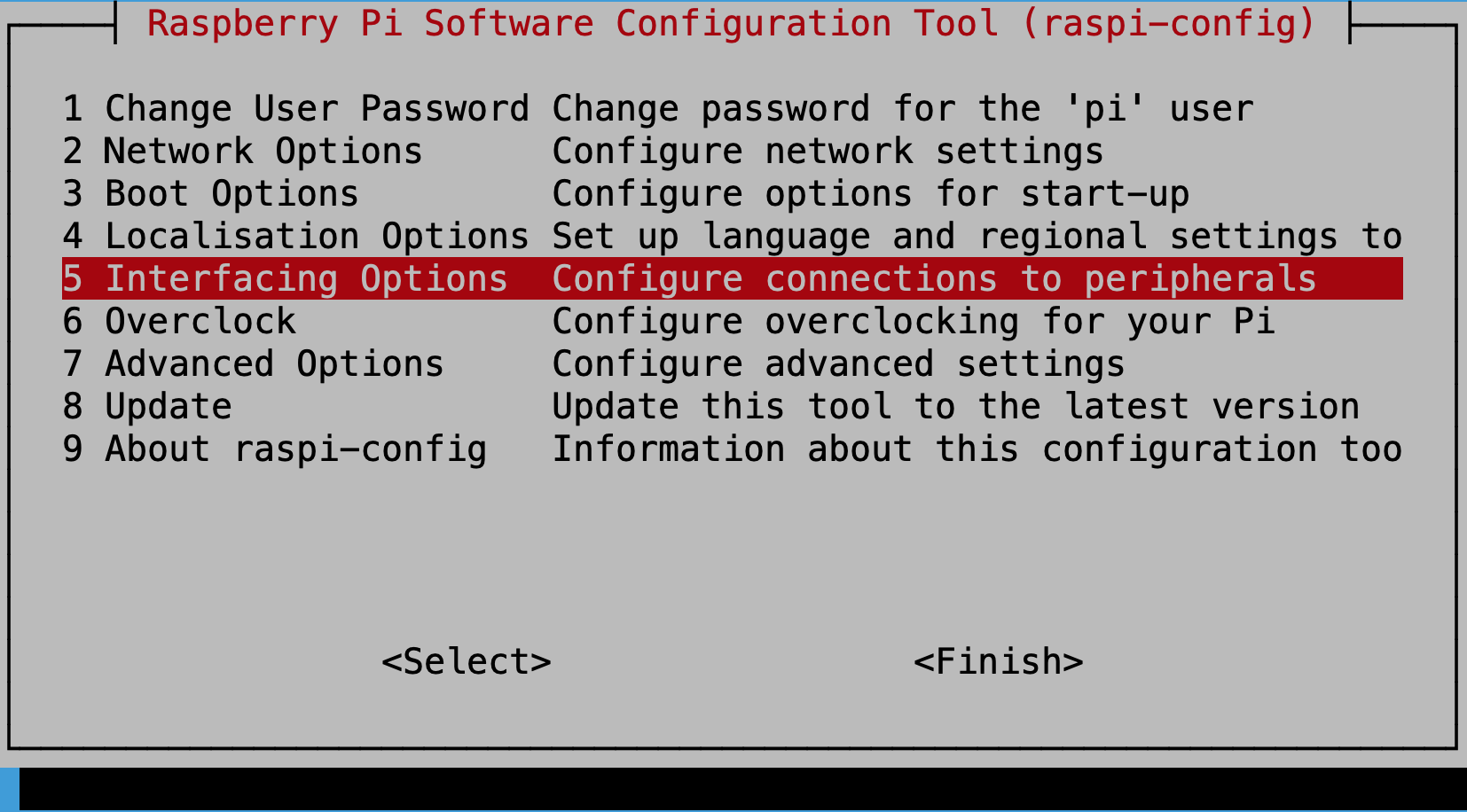
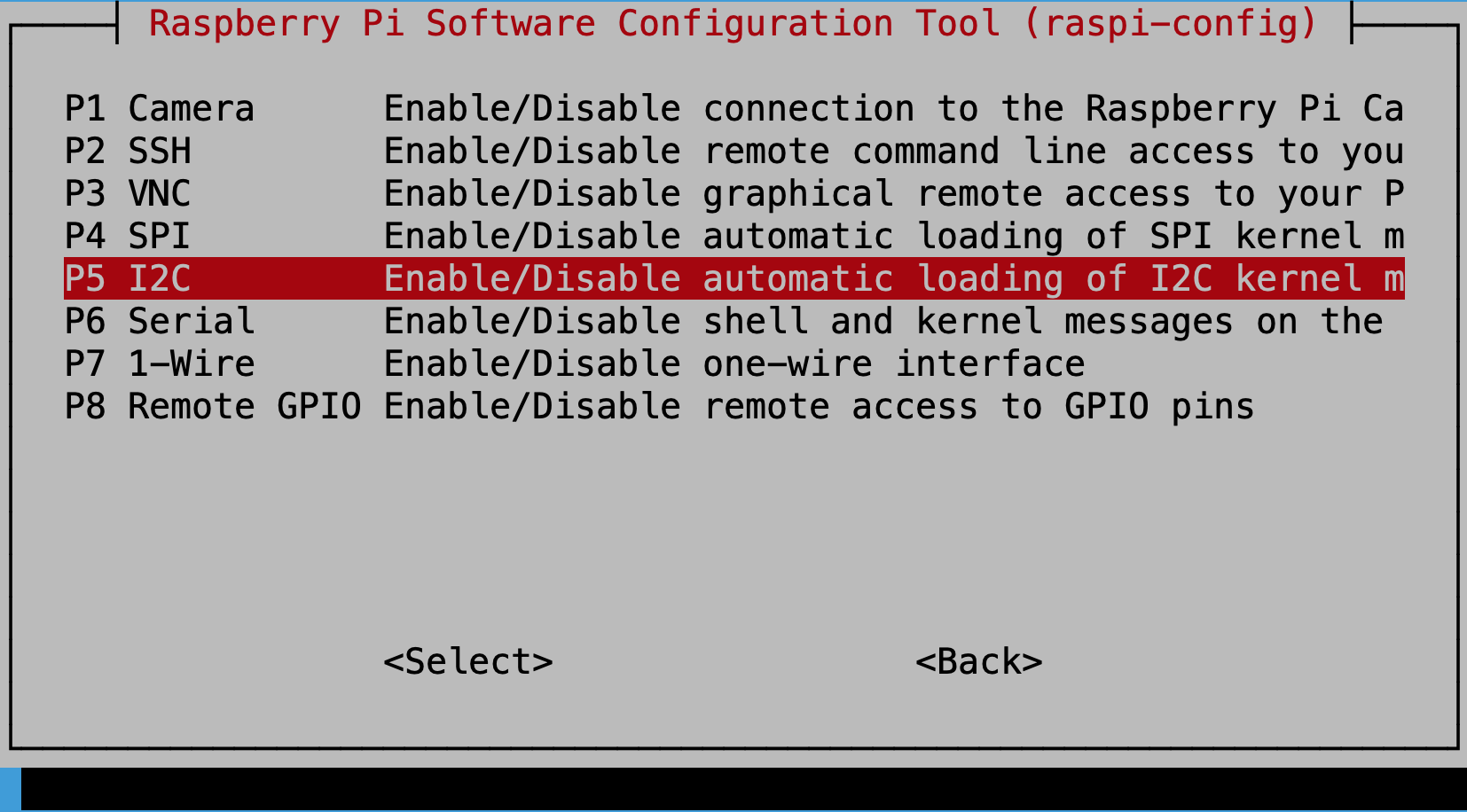
Step 4:啟動 Raspberry Pi 上的 I2C
首先,要先用 raspi-config 來啟動 I2C。這個在 Interfacing Options 中的 I2C 選項中:
Step 5:Raspberry Pi 上的 I2C (軟體)
就安裝 Raspberry Pi OS 而言,畢竟是個 Linux,所以基本的 I2C 資訊就可以從核心文件中的 I2C/SMBus Subsystem 來得到。比如說在 Implementing I2C device drivers in userspace 的章節中,就有出現如何在 User Space 去使用 I2C。
而除了這個之外,也可以在 python 使用 smbus 這個套件。可以用以下方式安裝:
$ sudo apt-get install python3-smbus
安裝這個東西會自帶 i2c-tools,比如說可以用 i2cdetect 這個工具去看看哪一條 bus 上面的哪個位置有 i2c 裝置:
$ i2cdetect -y 1
在什麼都沒有時,就會像下面這個樣子:
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
接下來就開始寫 Raspberry Pi 端的 master 吧:
from smbus import *
ARDUINO_ADDR = 0x8
I2C_BUS_NO = 1
i2c_bus = SMBus(I2C_BUS_NO)
while 1:
try:
message = input("Message to be send: ")
except:
break
for a in [ord(c) for c in message]:
i2c_bus.write_byte(ARDUINO_ADDR, a)
Step 5:連接裝置
將程式上傳到 Arduino 中,並且將 Raspberry Pi 的 A4 接到 GPIO2、A5 接到 GPIO3,並且連接。最後把傳輸線插到電腦並打開序列埠,觀察 I2C 的輸出。
在連接完之後,使用 i2cdetect:
$ i2cdetect -y 1
就可以發現剛剛指定的 Arduino I2C 的位置 (0x8) 出現在輸出上:
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- 08 -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
順帶一提一件有趣的事情是:雖然這邊的連接都是 I2C,但可以找到的範例程式幾乎都是 SMBus 的例子,比如說使用 python3-smbus 這個函式庫。這個或許可以從核心文件的 Implementing I2C device drivers 的 Sending and receiving 章節中找到為什麼:
If you can choose between plain I2C communication and SMBus level communication, please use the latter. All adapters understand SMBus level commands, but only some of them understand plain I2C!