Day 19:GPIO (Part 1) -- 人生的謊言:GPIO 很簡單
標題這句話可不是我說的。是 GPIO 子系統的維護者 -- Linux Walleij 在 2016 年的 ELCE 中講的話。然後就發現這句話是真的
簡介
GPIO 子系統在 userspace 的介面於 4.8 版後有了大幅度的更動,而這幾年大部分在 Linux Foundation 的演講也多半都跟這些更動有關。這些演講也多半很詳細的回顧舊的子系統,以及介紹新的子系統。
關於核心內部的實作,GPIO 子系統的主要維護者 -- Linus Walleij (另外一個 Linus!),在 2016 年的 ELCE 中發表了一個 GPIO for Engineers and Makers 演講。裡面詳細介紹了 GPIO 子系統的歷史與實作,包含舊的 GPIO 實作,以及新的以 GPIO descriptor 為主的 GPIO 子系統。除此之外,他也是 Pin Control 子系統的維護者,2018 年他也講了一個 GPIO and Pin Control for Embedded Systems,著墨在比較多硬體的議題上。
而關於 userspace ABI 的介紹,則屬 Bartosz Golaszewski 在各大研討會發表的演講為代表。在 2017 年的 ELCE、2018 年的 Kernel Recipe 都以 New GPIO interface for linux user space 為主題 (兩個演講的標題一模一樣) 介紹了這件事。同樣標題的演講中,最新的版本是去年在俄羅斯的 Open Source Tech Conference 的版本。而最新進度應該是他在 2020 年的 OSS NA 上 Linux GPIO: Evolution and Current State of the User API 演講。影片 3 個禮拜前才放上去,非常新鮮的資料!
而關於怎麼依照自己的需求調整 Device Tree,可以參考 2020 年 OSS NA 的 Tutorial: Spelunking for Hardware Data 演講,裡面示範了怎麼樣依照 data sheet 去修改相關的 Device Tree。演講最後面還有提供練習題跟解答!
硬體
一個典型的 GPIO 硬體大致上像這個樣子:
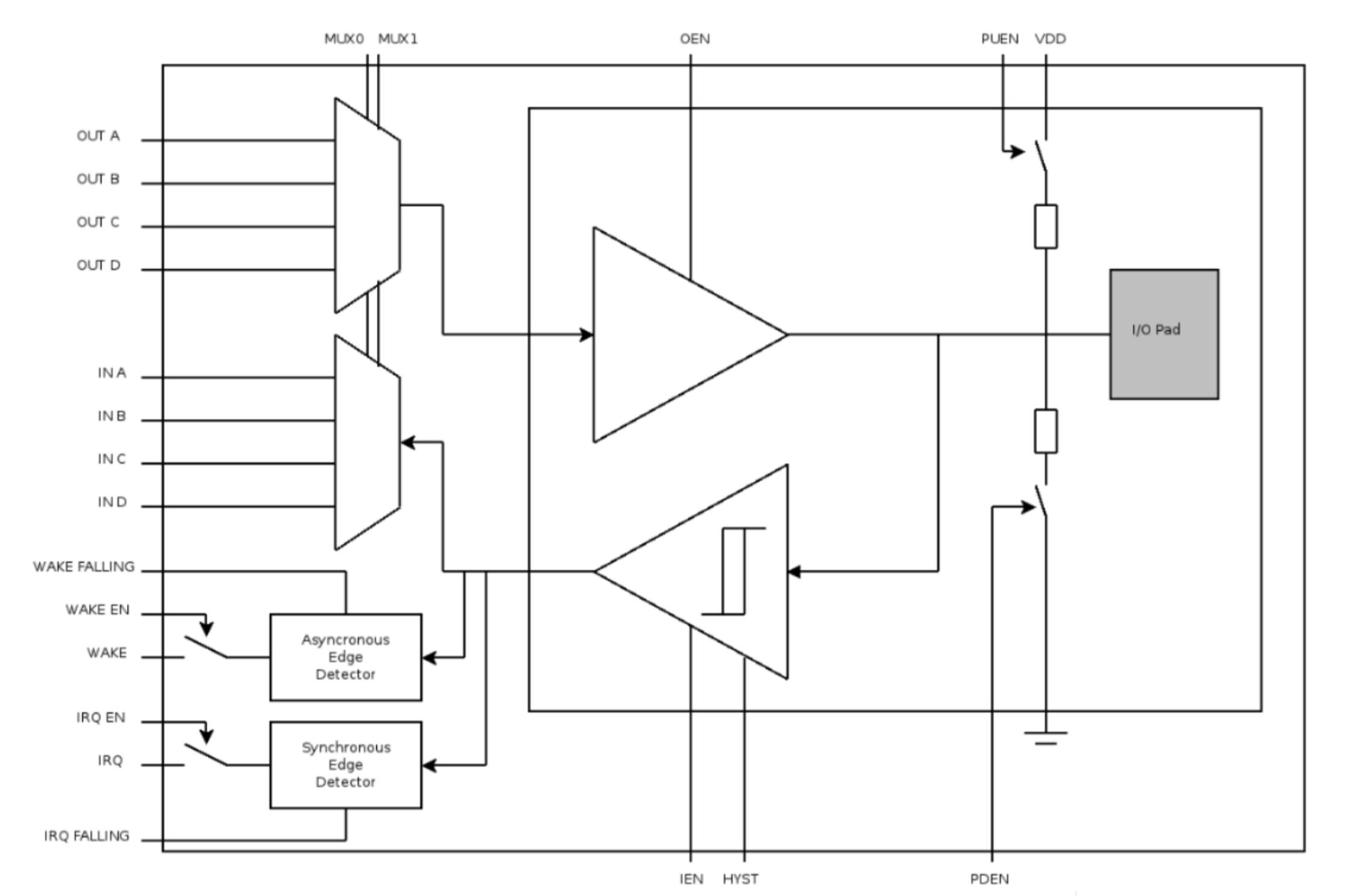
最主要的輸入與輸出是在左方,比如說輸出的來源是 OUT A 到 OUT D,而輸入的來源就是 IN A 到 IN B。他們中間則是經過運算放大器 (放大輸出電壓) 與施密特觸發器 (用來整理輸入電壓)。
除了這幾個主要的元件之外,當然還有一些上拉與下拉電組在旁邊,他們可以透過 PDEN (Pull-Down Enable)與 PLEN (Pull-Down Enable) 來控制是某要使用。
輸出:由左向右
輸出的路徑是「由左向右」。要輸出的訊號訊號來自於 OUT A 到 OUT B,也就是最右上角的部分。經過多工器的選取之後,輸出的訊號經過運算放大器放大到足夠的電壓,並且輸出給作右方的 I/O Pad 進行輸出。
輸入:由右向左
輸入的路徑則相反,是「由右到左」。訊號的來源是 I/O Pad,送給施密特觸發器去箝制電壓,並且輸入給左方的 IN A 到 IN B,或是送給最右下角的 Edge Detector,依照波形的 falling edge 或是 rising edge 去作為 IRQ 等等的來源。
不同子系統負責不同部分
雖然說整體電路的雛形像是這個樣子,但實際上這一個看起來簡單的架構中,不同的部分是由核心不同的子系統負責的。如果用這個模型來看,大致上可以區分成下列幾個區塊:
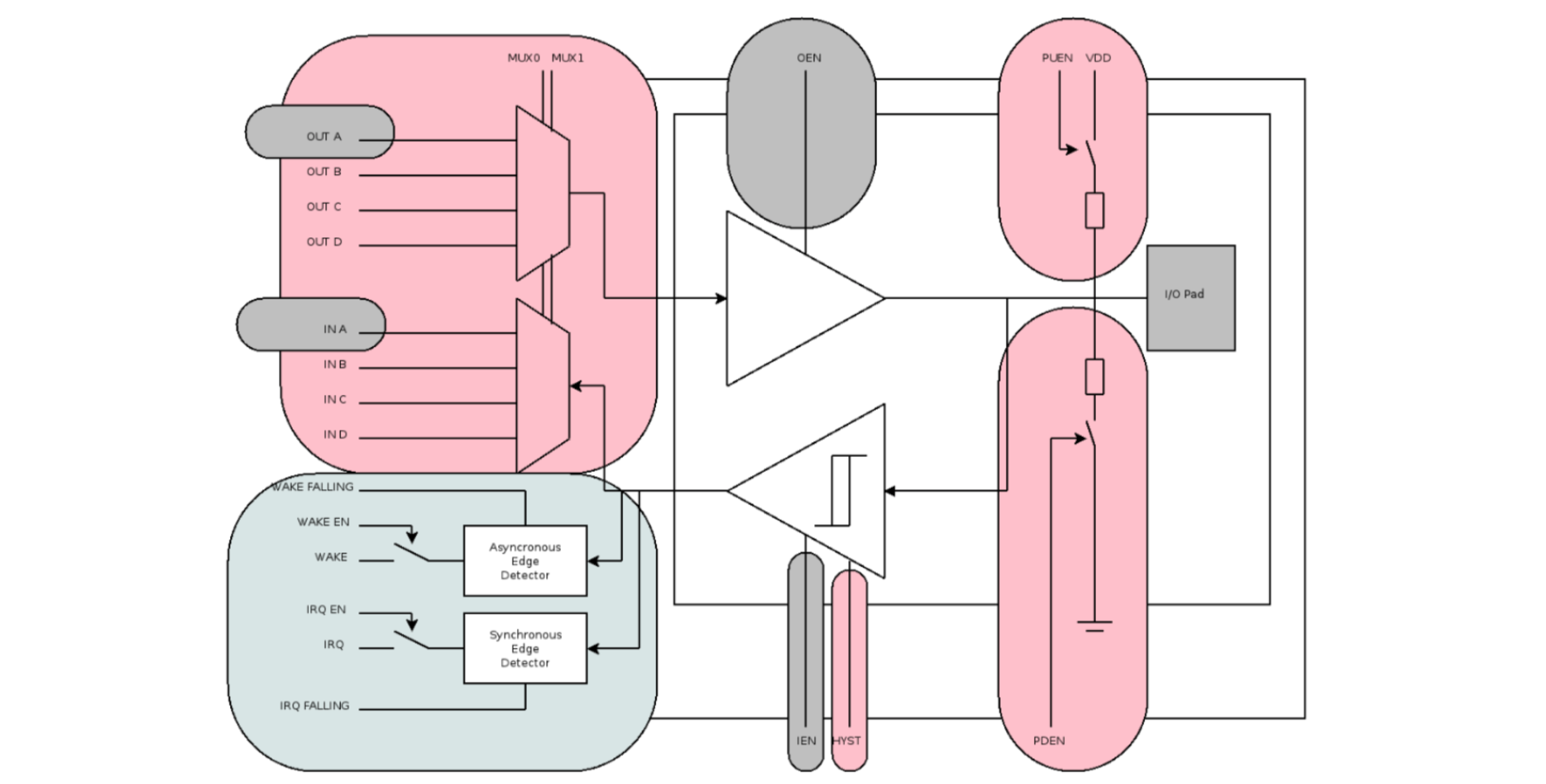
(圖片來源)
紅色:PINCTRL
選擇哪個輸入輸出,以及是否要啟動上拉、下拉電阻等等。這一部分是由 Pin Control 子系統 (或是簡稱為 pinctrl 子系統) 來控制。這看起來不像是需要一個專門的子系統來控制他...嗎?看到後面就會發現事情沒有那麼單純了。
灰色:GPIO
灰色的部分:讀、寫,還有 input enable 與 output enable 等等,由 GPIO 子系統控制。
藍色:IRQ
就左下角連接的部分。這個部分是將 GPIO 的邊緣觸發與 IRQ 作關聯,讓他們可以作為 IRQ 的來源。
問題:有哪些東西需要控制?
除了多工器要選擇哪個 IN A 到 IN D 哪個輸入或是 OUT A 到 OUT D 當中哪一個輸入之外,由上面的硬體配置還可以知道:這整個電路有很多地方可以配置,比如現在是輸入還是輸出?上拉下拉電阻要不要啟動?等等。而根據文件中的 GPIO electrical configuration 中的說明,對應上面的圖片來說明一個 GPIO 有哪些東西可以控制。
要不要啟動上拉、下拉電組?
就是上圖的 PLEN、PDEN 等等。
運算放大器:Open Drain/Open Source
這邊對應到的就是上圖中的運算放大器的部分。那個運算放大器可以用一個 CMOS 作為模型 「Sedra & Smith,你今晚的惡夢!」:
VDD
|
OD ||--+
+--/ ---o|| P-MOS-FET
| ||--+
IN --+ +----- out
| ||--+
+--/ ----|| N-MOS-FET
OS ||--+
|
GND
控制 PMOS 跟 NMOS 兩端的開關分別是 OD 與 OS,這兩個名字也很好理解:當僅有 OD 打開不接通,而 OS 接通時,這時候就是 Open Drain 的配置; 而如果相反:OD 接通,但是 OS 打開不接通,那就是 Open Source 的配置; 若兩者均接通,那麼他就會變成一個 push-pull 電路。
而可以想見上述這些都可以透過設定某些暫存器的某些位元來做到。說這裡 就是一個例子。
Debouncing
有時候訊號輸入會因為物理機制,而產生上下抖動。比如說打開開關時,開關的撞擊可能會產生震動,使得電壓產生波動。像是圖片 這樣:
可以想見:如果現在有一個中斷是透過邊緣觸發的話,這樣的波動就會在短時間內重複地觸發中斷,但這並不是預期的結果。要處理這件事情可以比如說等一小段時間。而 gpiod_set_debounce 就可以負責這類功能。
這樣就結束了嗎?
其實不是。不同裝置有不同的硬體,會對上面有不同程度的支援。像比如說:未必每一種硬體都有上拉/下拉電阻。除此之外,還有比如 power source、sleep state setup、slew rate 等等可能的配置。
誰負責誰:PINCTRL 代打,或是自行實作
在核心中,主要是由 struct gpio_chip 這個結構來代表 GPIO Chip。一個 GPIO Chip 的驅動程式,就是要提供這些功能的實作:
struct gpio_chip {
const char *label;
struct gpio_device *gpiodev;
struct device *parent;
struct module *owner;
int (*request)(struct gpio_chip *gc,
unsigned int offset);
void (*free)(struct gpio_chip *gc,
unsigned int offset);
int (*get_direction)(struct gpio_chip *gc,
unsigned int offset);
int (*direction_input)(struct gpio_chip *gc,
unsigned int offset);
int (*direction_output)(struct gpio_chip *gc,
unsigned int offset, int value);
int (*get)(struct gpio_chip *gc,
unsigned int offset);
int (*get_multiple)(struct gpio_chip *gc,
unsigned long *mask,
unsigned long *bits);
void (*set)(struct gpio_chip *gc,
unsigned int offset, int value);
void (*set_multiple)(struct gpio_chip *gc,
unsigned long *mask,
unsigned long *bits);
int (*set_config)(struct gpio_chip *gc,
unsigned int offset,
unsigned long config);
int (*to_irq)(struct gpio_chip *gc,
unsigned int offset);
void (*dbg_show)(struct seq_file *s,
struct gpio_chip *gc);
int (*init_valid_mask)(struct gpio_chip *gc,
unsigned long *valid_mask,
unsigned int ngpios);
int (*add_pin_ranges)(struct gpio_chip *gc);
int base;
u16 ngpio;
const char *const *names;
bool can_sleep;
const char *const *names;
[...]
};
GPIO 的控制則是由這個結構中實作的函式來決定,比如說可以看到 direction_input 或 diretion_output 來控制方向。而當中有一個 set_config 這個函式來負責控制上面這些東西。而有時候 set_config 直接用 gpiochip_generic_config() 這個函數作為預設,這時就會以 PINCTRL 子系統中來作為 backend。