Day 12:I2C Driver (Part 2) - 細節、追蹤與驗證
在驅動程式裡面打滾完之後,接下來看一些比較細節的部分。
上拉電組
這個其實不是 I2C 專屬的概念,但是滿常會看到這類「上拉」「下拉」這種術語的。就稍微補充一下。
邏輯電路中,資料的傳輸都是使用高低電位表示。這個「高」「低」電位直覺上來說就像是開關一樣,一個狀態是「打開」,一個狀態是「關閉」。而這個「開關」通常也不是實體的開關,通常是用電晶體:以 MOSFET 為例,假定 GDS 3 個極分別接上:
- 源極 (S) 接高電位
- 極集 (D) 接低電位
- 閘極 (G) :用他是「高電位」或「低電位」來控制是否導通。
閘極電壓在低電位的時候,閘極跟源極的電位差就是 0,根本沒辦法衝破 threshold voltage,所以汲極跟源極就不會導通; 反之,如果在閘極在高電位,那這時候源極跟汲極的電壓差瞬間會超過飽和電壓 (因為這時飽和電壓是閘極電壓 - threshold voltage,顯然比閘極電壓自己還要小),所以就會瞬間飽和,變成導通的狀態。
不管用什麼方式,總之有接通時跟不接通時,就會剛好有兩種不同的電壓,所以就可以當作 0 跟 1...嗎?如果僅僅只有開與關的狀態,那麼答案是未必。因為斷路的狀況下,電壓值是未定的 (也就是 float 狀態)。所以這時候就沒有辦法確認電壓是多少。
「沒接東西」不代表「電位是 0」。舉例來說,兩個 IC 都沒有接地 (或者說沒有共地),不代表這個 IC 的地線電位一樣。
上拉/下拉電組的功能就是避免「想要用通路/斷路製造兩種電位時,卻因為 float 而無法達到預期效果」。這時候可以把開關的線路上加一個電組,像這樣:
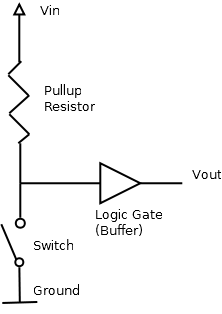
當開關接通時,邏輯閘的輸入端就會跟地面接通,因此輸入電位就是 0; 反之,如果是斷開的,因為連接了一個電阻的關係,電壓就會是一個確切的值。
這個電阻值的大小必須要跟整個系統做配合。兩個極端的例子就是:
- 當這個電阻趨近 0 的時候,開關接通時就會變成短路
- 而如果他的電阻非常大,開關斷開時這個電阻就會佔用很大的分壓,那麼邏輯閘的輸入電壓就會比預期的小很多,沒辦法被判斷為高電壓。
而 I2C 當中就是利用上拉電阻。可以參考 NXP 的 I2C 規格 中的附圖:
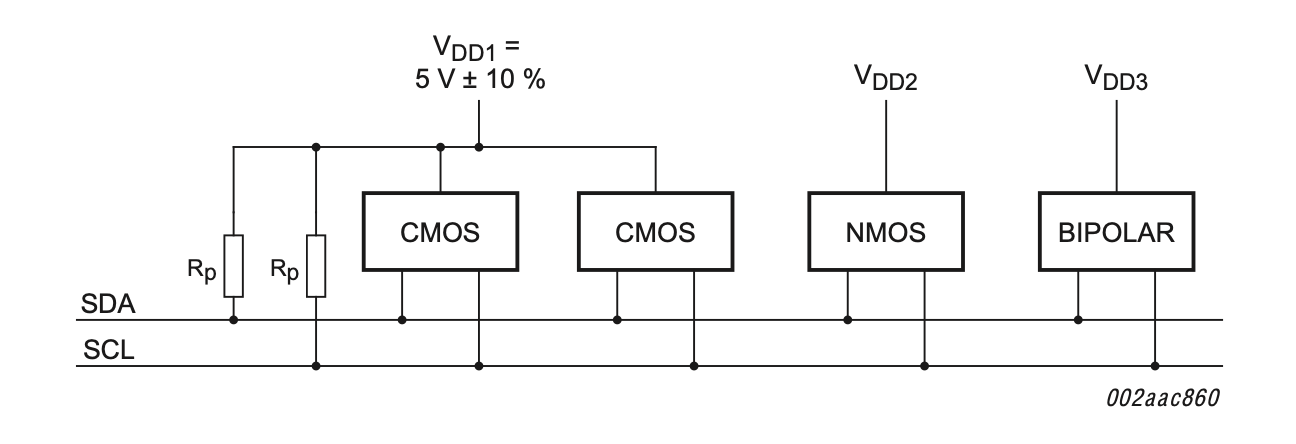
這張圖是示範如果有 3 種高電位的電壓準位,該怎麼配置。不過左半邊 CMOS 的部分所連接的 Rp ,就擔任前面說的上拉電阻的功能。
Kernel 中的 I2C 架構
整個核心中的 I2C 子系統架構,依照核心文件的參考資料可知,架構大概是下面這樣:
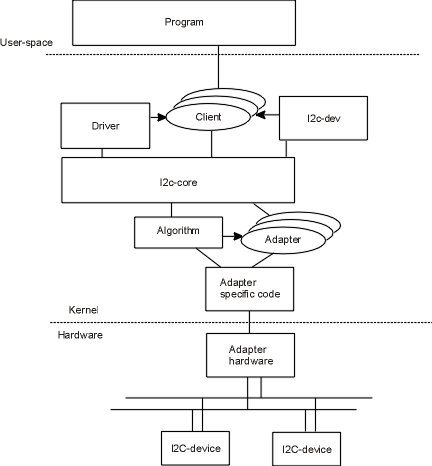
Client:struct i2c_client
在核心的術語中,I2C 的從端 (slave) 不是用 slave 稱呼,而是稱為 client,對應的結構體是 struct i2c_client。也就是在 I2C probe 函數裡面會拿到的那個 client 變數。
Driver:struct i2c_driver
而圖中的 Driver 則是對應到 i2c_driver,也就是要填 probe 跟 remove 的那個結構體。
Adapter:struct i2c_adapter
除了代表 slave 的 client 之外,master 也有對應的結構。根據 Linux 在 I2C 中的文件,Linux I2C 子系統中,I2C 的 master 用來控制 bus 的程式,會用 adapter 來稱呼 (而不會叫他 bus controller 或其他之類的稱呼)。而代表他的結構是 struct i2c_adapter。從原始程式碼的註解中,也可以看到相關的說明:
"i2c_adapter is the structure used to identify a physical i2c bus along with the access algorithms necessary to access it."
而這個結構當中的 struct i2c_algorithm 裡面負責提供特定 I2C bus 上的傳輸方法的實作:
struct i2c_algorithm {
/*
* If an adapter algorithm can't do I2C-level access, set master_xfer
* to NULL. If an adapter algorithm can do SMBus access, set
* smbus_xfer. If set to NULL, the SMBus protocol is simulated
* using common I2C messages.
*
* master_xfer should return the number of messages successfully
* processed, or a negative value on error
*/
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
int num);
int (*master_xfer_atomic)(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num);
int (*smbus_xfer)(struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
int (*smbus_xfer_atomic)(struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality)(struct i2c_adapter *adap);
#if IS_ENABLED(CONFIG_I2C_SLAVE)
int (*reg_slave)(struct i2c_client *client);
int (*unreg_slave)(struct i2c_client *client);
#endif
};
最重要的東西就是那堆 _xfer 函數。而這也是 i2c adapter 驅動要實作的東西。像 drivers/i2c/busses/i2c-altera.c 這個例子這樣。而更近一步的說明可以在今年的 Open Source Summit 中的 "Tutorial: Introduction to I2C and SPI: Both In-kernel and In-userspace" 中得到。
用 ply 追蹤
如果用 ply 追蹤的話,也可以發現他們的蹤跡。比如說把上一篇的模組裝起來,然後去統計看看 stack:
kprobe:*_xfer / !strcmp(comm, "test") /
{
@[stack] = count();
}
就會發現明顯出現了 i2c 相關的東西:
@:
{
__i2c_smbus_xfer
i2c_smbus_write_byte+64
brcmf_core_exit+118048
__vfs_write+72
vfs_write+180
ksys_write+104
__se_sys_write+24
__hyp_idmap_text_start
}: 29
{
i2c_smbus_xfer
brcmf_core_exit+118048
__vfs_write+72
vfs_write+180
ksys_write+104
__se_sys_write+24
__hyp_idmap_text_start
}: 29
去查看看這兩個函數,會發現 arg1 的參數都是 I2C slave 的位址,所以就可以看看他們是不是真的傳到 Arduino 那邊去 (之前在 Device Tree 中是設定成 0x8):
kprobe:*_xfer / !strcmp(comm, "test") /
{
@[stack, arg1] = count();
}
然後就發現是:
@:
{
__i2c_smbus_xfer
i2c_smbus_write_byte+64
brcmf_core_exit+118048
__vfs_write+72
vfs_write+180
ksys_write+104
__se_sys_write+24
__hyp_idmap_text_start
, 8 }: 29
{
i2c_smbus_xfer
brcmf_core_exit+118048
__vfs_write+72
vfs_write+180
ksys_write+104
__se_sys_write+24
__hyp_idmap_text_start
, 8 }: 29
用 ftrace 追蹤
另外一件有趣的事情是:可以把上一篇的模組載入進去之後,用 trace-cmd 去看他的過程中會執行到核心的哪些東西:
$ sudo trace-cmd record -p function_graph -a -F ./test
按:
test程式可以參考上一篇。
等待執行結束後,請 trace-cmd 報告:
$ trace-cmd report | less
追蹤提供給驅動程式的 read
稍微搜尋一下 i2c,就會發現他呈現了字元驅動程式預期的行為:在 sys_write 呼叫之後,他去呼叫了之前實作的 arduino_i2c_write,這裡面就有使用 I2C 傳輸的部分:
+sys_write() {
ksys_write() {
__fdget_pos() {
__fget_light();
}
+ vfs_write() {
rw_verify_area();
__vfs_write() {
+ arduino_i2c_write() {
+ i2c_smbus_write_byte() {
+ i2c_smbus_xfer() {
i2c_adapter_lock_bus() {
rt_mutex_lock() {
_cond_resched() {
rcu_all_qs();
}
}
}
__i2c_smbus_xfer() {
__i2c_transfer() {
bcm2835_i2c_xfer() {
bcm2835_i2c_start_transfer();
bcm2836_arm_irqchip_handle_irq() {
handle_IPI() {
irq_enter() {
rcu_irq_enter();
}
__wake_up() {
__wake_up_common_lock() {
_raw_spin_lock_irqsave();
__wake_up_common();
_raw_spin_unlock_irqrestore();
}
}
[...]
追蹤提供給驅動程式的 open
又比如說開檔的部分,可以發現在檔案系統開檔時,就用到了之前實作字元驅動程式時,提供給 struct file_operations 的 arduino_i2c_open 函數:
[...]
vfs_open() {
do_dentry_open() {
path_get() {
mntget();
}
try_module_get();
chrdev_open() {
_raw_spin_lock();
cdev_get() {
try_module_get();
}
try_module_get();
module_put();
+ arduino_i2c_open();
}
file_ra_state_init();
}
}
[...]