Day 8:Device Tree (Part 1)
前言:應用情境與歷史
再開始看這個東西之前可以思考一個情境:假設現在有一個板子的規格書上描述了一堆 MMIO 的區域,比如說設定 GPIO 對應的暫存器記憶體映射在哪、I2C 的記憶體映射在哪等等。該如何讓程式知道這些跟硬體有關的映射呢?
一個可能的情境就是:把這些記憶體映射的位址,通通寫死在程式中。比如說:把這些東西都寫在一個標頭檔裡面,像 Arduino 把各個腳位配置寫死在 pin_arduino.h 這個標頭檔中一樣。像這樣:
...
#define PIN_SPI_SS (10)
#define PIN_SPI_MOSI (11)
#define PIN_SPI_MISO (12)
#define PIN_SPI_SCK (13)
static const uint8_t SS = PIN_SPI_SS;
static const uint8_t MOSI = PIN_SPI_MOSI;
static const uint8_t MISO = PIN_SPI_MISO;
static const uint8_t SCK = PIN_SPI_SCK;
...
而不同的硬體因為配置不同,所以這些描述硬體的標頭檔也可能不同。比如說 Arduino core 的原始碼 中,就針對 Mega、Yun、Gema 等等不同變體的 Arduino,分別定義了獨立的 pins_arduino.h 檔案 (在名稱對應的資料夾中)。
問題 1:重用性不佳
不過 Linux 要支援的硬體非常多,這類描述硬體的標頭檔往往缺乏一致的實作標準,而且又不得不放在核心的程式碼裡面。一個板子就一個檔案,而同一系列的硬體往往僅有些為差異,因此程式的重用性並不好。比如說上面 Arduino 的例子中,一個板子就有一個自己的 pins_arduino.h 檔案。
問題 2:不利維護
除此之外,多人協作的時候會有更麻煩的問題。比如說 A 公司的不同團隊同時更動了某一個描述硬體的標頭檔,這時的 conflict 會反映在上游的核心開發工作上。但既然是描述 A 公司硬體的檔案,為什麼反而是核心的維護人員要處理呢? Linus Torvalds 則表示:"Guys, this whole ARM thing is a f\cking pain in the ass."*
為了使硬體描述與核心的原始碼脫鉤,就有了 device tree 這個東西。在比較初期的一些演講中會有更多相關的說明。比如這個 2013 年在 ELCE 的演講 Devicetree: The Disaster so Far。這個演講中大約到 6:28 秒前,有大概提到 device tree 的歷史跟動機:不同的供應商在處理硬體相關的程式碼時,並沒有一致的方法。而且相關的參數都寫死在 board file 中,檔案的重用性跟維護性就面臨挑戰,稍微改變周邊的硬體配置時還要將核心重新編譯一次,維護上很麻煩。
而 Device Tree 就是一個針對這個問題的解決方案。這是一種「硬體描述」的語言,以巢狀的階層來表示不同硬體之間的連接關係。
例子:STM32F429-Discovery
以 STM32F429-Discovery 為例子,它位於 arch/arm/boot/dts 當中。若搜尋 stm32,可以找到一些副檔名為 dts 與 dtsi 的檔案,這些都是 Device Tree 的一部分。通常 dtsi 僅有部分的 Device Tree,是用來給其他 dts 檔引入,以增加重用性。而 dts 就是代表某個特定板子的硬體 Device Tree。
舉例來說,在arch/arm/boot/dts/stm32f429-disco.dts 中,可以看見開頭引入了 stm32f429.dtsi 與 stm32f429-pinctrl.dtsi 兩個檔案:
/dts-v1/;
#include "stm32f429.dtsi"
#include "stm32f429-pinctrl.dtsi"
#include <dt-bindings/input/input.h>
其中,第二個 stm32f429.dtsi 檔案,可以發現以下內容 (部分內容省略):
spi2: spi@40003800 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "st,stm32f4-spi";
reg = <0x40003800 0x400>;
interrupts = <36>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(SPI2)>;
status = "disabled";
};
spi3: spi@40003c00 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "st,stm32f4-spi";
reg = <0x40003c00 0x400>;
interrupts = <51>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(SPI3)>;
status = "disabled";
};
usart2: serial@40004400 {
compatible = "st,stm32-uart";
reg = <0x40004400 0x400>;
interrupts = <38>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(UART2)>;
status = "disabled";
};
usart3: serial@40004800 {
compatible = "st,stm32-uart";
reg = <0x40004800 0x400>;
interrupts = <39>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(UART3)>;
status = "disabled";
dmas = <&dma1 1 4 0x400 0x0>,
<&dma1 3 4 0x400 0x0>;
dma-names = "rx", "tx";
};
usart4: serial@40004c00 {
compatible = "st,stm32-uart";
reg = <0x40004c00 0x400>;
interrupts = <52>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(UART4)>;
status = "disabled";
};
usart5: serial@40005000 {
compatible = "st,stm32-uart";
reg = <0x40005000 0x400>;
interrupts = <53>;
clocks = <&rcc 0 STM32F4_APB1_CLOCK(UART5)>;
status = "disabled";
};
...
對照使用手冊 p. 52 的記憶體映射區域:
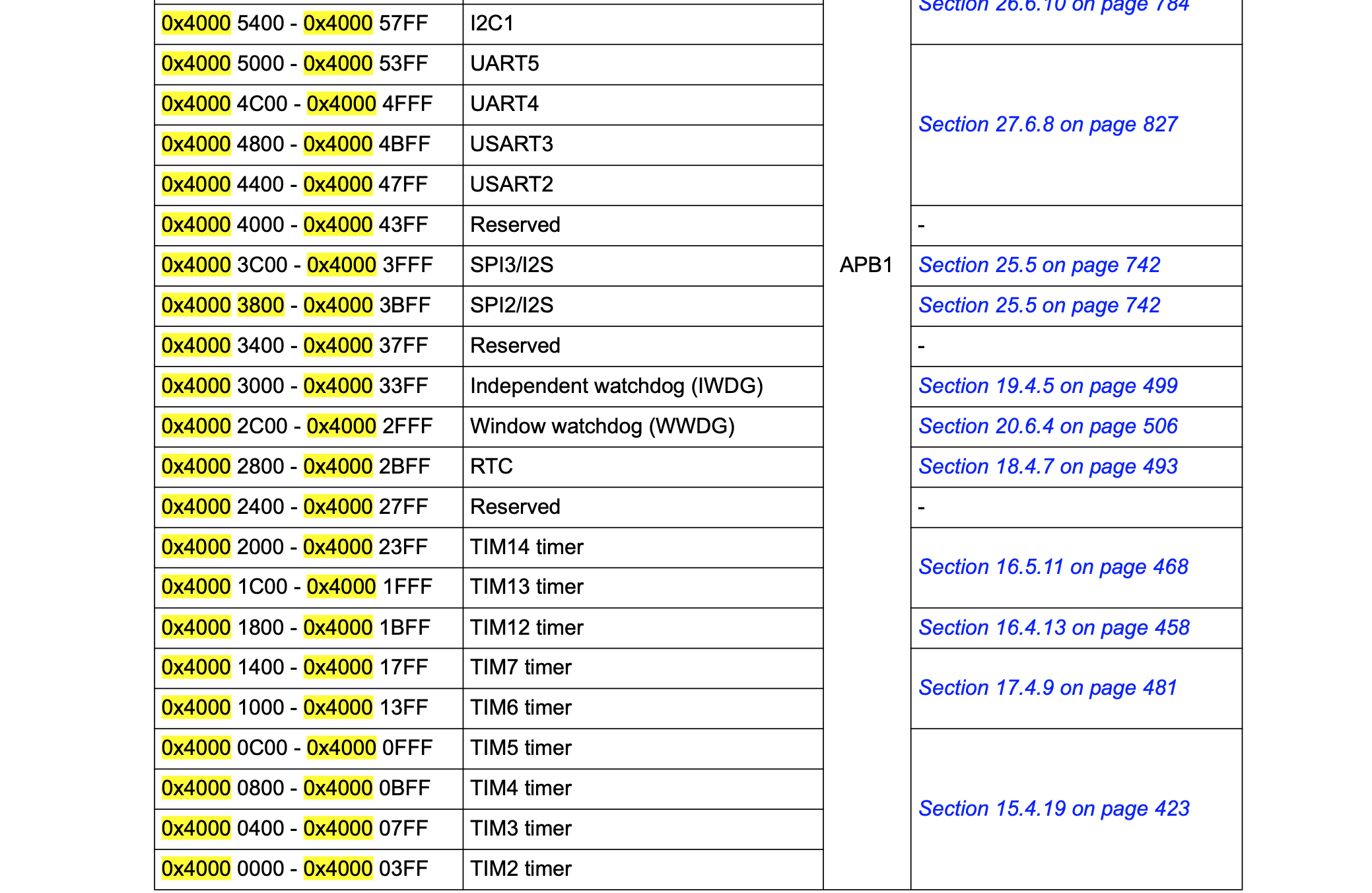
可以發現 Device Tree 中描述的位址恰好就對應 usart 與 spi 的描述。其他如 timer、i2c 的周邊描述,也都紀錄在其中。
關於 Device Tree 在 Linux 中的歷史,比較早期的介紹是 Thomas Petazzoni 在 2013 年的 Device Tree for Dummies! 這個演講。不過這個演講有一部分的內容是過時的。舉例來說:裡面有提到關於 Device Tree 的相關文件很少,並且建議可以參考 ePAPR (他是 Device Tree 規格參考的原型)。但現在 Device Tree 的標準已經由 devicetree.org 這個單位專門負責,當中也明確包含了規格文件。而在 2020 年的 Open Source Summit 則出了一個 Device Tree 的教學 Tutorial: Device Tree (DTS), Linux Board Bring-up and Kernel Version Changing。
流程:先引入,後覆蓋
一個硬體的 Device Tree 並不是從 0 開始寫出來的。既然是以階層來描述硬體,所以就會由上往下結合這個硬體所包含的各種成分的 Device Tree。下游硬體供應商看看用了什麼上游的硬體,然後把他們一個一個引入,最後再「覆蓋」上自己新曾的部分
舉例來說: SoC 的設計者可能會「引入」上游處理器預設的 Device Tree ,並以之為基礎,「疊加」上這個 SoC 上需要使用處理器哪些硬體部分,或是新增某些周邊的硬體描述。處理器原來的 Device Tree 跟「疊加」上去的 SoC 的硬體描述,合起來就成為 SoC 的 Device Tree ,並且給下游需要這個硬體描述的供應商 (比如說某個開發版的供應商) 作為參考。
類似地,板子的供應商拿到 SoC 預設的 Device Tree,也遵循類似的流程:「引入」 SoC 供應商提供的預設的 SoC Device Tree 為基礎,「別家」上板子上其他硬體的描述,生出板子的 Device Tree,並且給下游 (比如說 Linux kernel) 使用。
所以總和上述的資訊,在使用 Device Tree 的過程大致上是下面 2 個步驟:
Step 1:引入預設的 Device Tree
引入既有硬體的 Device Tree 之後,決定要使用既有硬體的哪些資源,然後在現在的 Device Tree 檔案中把需要用的東西寫出來。這些 Device Tree 通常會以 .dtsi 為副檔名:
/dts-v1/;
+#include "lorem-ipsum.dtsi"
.
.
#include <dolor-sit-amet.h>
/{
/* Modification */
}
除了引入既有的 Device Tree 之外,還可以引入 C 語言的巨集。不過,這邊的巨集通常是用來定義常數,以避免一堆數字造成可讀性上的困難:
/dts-v1/;
#include "lorem-ipsum.dtsi"
.
.
+#include <dolor-sit-amet.h>
/{
model = "Consectetur Adipiscing Board Design"
.
.
}
Step 2:疊加上需要改變的部分
剛剛 #include 進的東西是目前具有的硬體資源的描述。接下來就要看這些資源當中,自己需要哪些資源,然後描述在 \{ ... } 的範圍內:
/dts-v1/;
#include "lorem-ipsum.dtsi"
.
.
#include <dolor-sit-amet.h>
+/ {
+
+ /* Modification */
+
+}
例子:SoC 供應商的角度
SoC 拿到某個處理器的硬體描述,所以在 SoC 的 Device Tree 中引加預設的處理器的 Device Tree:

/dts-v1/;
+ #include "processor.dtsi"
/{
}
這些通常是由供應商提供,可以供參考的 Device Tree。如 arch/arm/boot/dts 裡面的armv7-m.dtsi。再依照 SoC 的設計,決定需要處理器的哪些硬體,以及加上其他硬體周邊的描述:
/dts-v1/;
#include "processor.dtsi"
+/{
+ /* Modification */
+}
例子:開發版供應商的角度
有了 SoC 的硬體描述之後,設計板子的人拿到 SoC 的 Device Tree,就換成使用預設的 SoC Devie Tree,再自己的板子需要哪些 SoC 的硬體功能 (比如說:SoC 可能有 6 個 uart,但現在只需要一個,那麼就只要提供一個 uart 的資訊給核心就可以了),然後加入相關的描述。以及增加板子上的其他周邊或硬體的硬體描述。
所以這一連串的引入關係就會像是這樣:
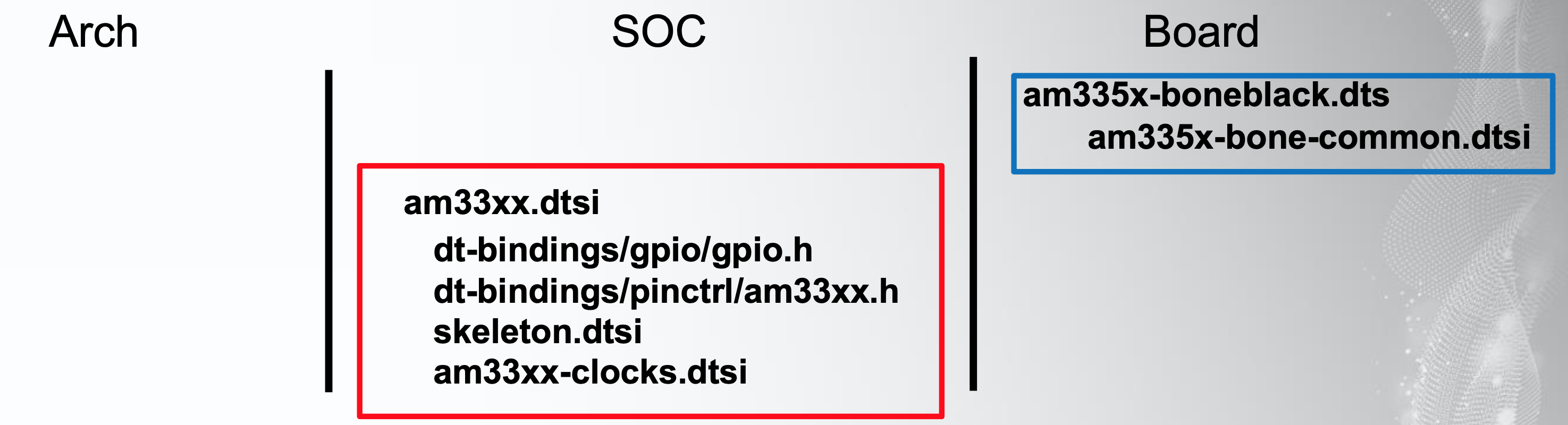
SoC 供應商會引入與處理器架構有關的 Device Tree,並且在這個 SoC 的 Device Tree 中決定哪些部分需要使用; 而板子的供應商又引入 SoC 供應商的 Device Tree,並且以其為基礎決定哪些 SoC 上的硬體需要使用。